Olex System Descriptive Brochure (Mackay Marine)
Olex Software is a unique system for navigation and charting, developed by the Norwegian company Olex AS.
The system is used in fisheries, aquaculture, and maritime contracting, and consist of three main elements:
1) Functions for seabed, water column and currents mapping
2) Navigation, and display of digital vector charts
3) Plotting functions
GRIB
The Weather Forecast System will automatically download the latest information about currents, waves, wind and air pressure and display that information graphically with colors, arrows and graphs. See the weather as it is now, in the future or what the weather will be like when you pass trough an area. The GRIB-module also comes with support for downloading certain types of plotter data, such as information about fisheries from Barents Watch.
Information about wind, current, and air pressure can be downloaded from met.no for free. The way the information is presented in the Olex is inspired by yr.no.
AIS
AIS is an automatic identification system which uses the VHF band for transmitting and receiving data from other ships.
If Olex have an AIS-receiver connected, and the AIS software module installed, all vessels, with AIS, within radio range will appear on screen. The AIS targets will display as triangular boat symbols with their names an MMSI numbers depending on what they are transmitting.
HT
Some echo-sounders can measure the seafloor’s ability to reflect sound as well as the depth. By analyzing data from these sounders, Olex are able to calculate the hardness of the sea floor.
The system take into account parameters like: pulslength beamwith and transducer type, and calculates a bottom echo based on hydroacoustic theory. The calculated hardness values is integrated in the seafloor map together with the topographic depht values.
The hardness is displayed in colors. From deep purple for soft, to light yellow for hard seafloor. Depending on type of data input from the ecodounder, various tools for signal processing, settings and history can be opened in separate windows on the screen.
ITI
The NMEA sentence $PSIMSSB comes in different varieties. Those understood by Olex, contains a bearing from the boat to the ROV. Others will give format errors. The equipment that generates the message must know the boat’s true heading.
The sentence should contain at least 10 fields separated by commas, the first one being a time stamp. The second is a name of the ROV target, and the third should be “A”. The fourth field is empty, and the fifth should be “C”. The sixth should be either “N”, “E” or “H”, and the seventh can be any character. Fields number 8 and 9 is the horizontal distance in meters from boat to ROV, and number 10 is the vertical distance.
SB
The SB-module lets the Olex detect and map water currents. By analyzing five NMEA data types – position, speed over ground, course over ground, true heading, and speed through water – the vessel drift related to ground is calculated and shown as a variable-size arrow pointing away from the ship. This drift is assumed to be representative of the water current. Accuracy is very good and only limited by instrument resolution.
In addition to the real-time water current, the values are also mapped in a cell-like structure much like the seabed depth, albeit at a somewhat coarser resolution. The mapping takes the main tidal phase into account; that is, for a given position, currents are mapped in several time slices synced to the moon’s angle from the earth, the so-called M2 tidal constituent.
HGPS
The HGPS software module take advantage of the accuracy from advanced GPS receivers, with enhanced position and height output, in order to exactly place each single beam bottom detection in the sea floor map. HGPS also eliminates the effect from tide, sea-waves and vessel depth in water.
This combination makes the user able to perform exact and repeatable sea floor survey, and achieve a high resolution sea floor map using a single beam echo-sonder.
For best possible result, roll/pitch sensor and an echo-sounder with high ping rate is recommended.
TRIPOS
Tripos is an attitude system, developed by Olex to provide exact position, height, roll, pitch and heading. Tripos uses three GPS antennas and two GPS receivers, connected by Ethernet. The antennas can be mounted anywhere on the boat, as long as they form a triangle with mutual dimensions as large as possible. Tripos is used internally by Olex for single-beam mapping with HGPS, and multi-beam mapping using Atec 400 or WASSP. Tripos does not output data from the Olex, and thus can not be used for correction of systems outside Olex. A well mounted Tripos can provide accuracy as good as 0,05 degrees RMS in roll, pitch and heading. Using RTK, accuracy of 1 cm in position and 2 cm in height can be achieved.
A complete delivery of a standard Tripos system from Olex may consist of the following hardware and software:
- 1 pc Trimble BX982 (-07) GNSS receiver for position
- 1 pc Trimble BX982 (-03) GNSS receiver for attitude
- 3 pc antennas, GA830
- 3 pc antenna cables, GNSS, TNC/TNC, RG-58, 10 meter
- 1 pc TRIPOS software module for Olex
ATEC 400
Atec 400 is our new multi-beam sonar system. It combines a sonar from NORBIT with software from Olex. While being compact and handy, Atec 400 is accurate and powerful. No junction box or control PC is needed, just connect the sonar directly to the Olex!
The sonar uses broadband technology for increased range and accuracy. With its high ping rate and wide maximum swath coverage of 180 degrees, Atec 400 is especially effective in shallow water survey. At greater depths, one can reduce the swath range in order to increase the ping rate. During sea-trials we have been able to map down to 250 meters.
RE, SEAPIX, MBES, WASSP are also available!
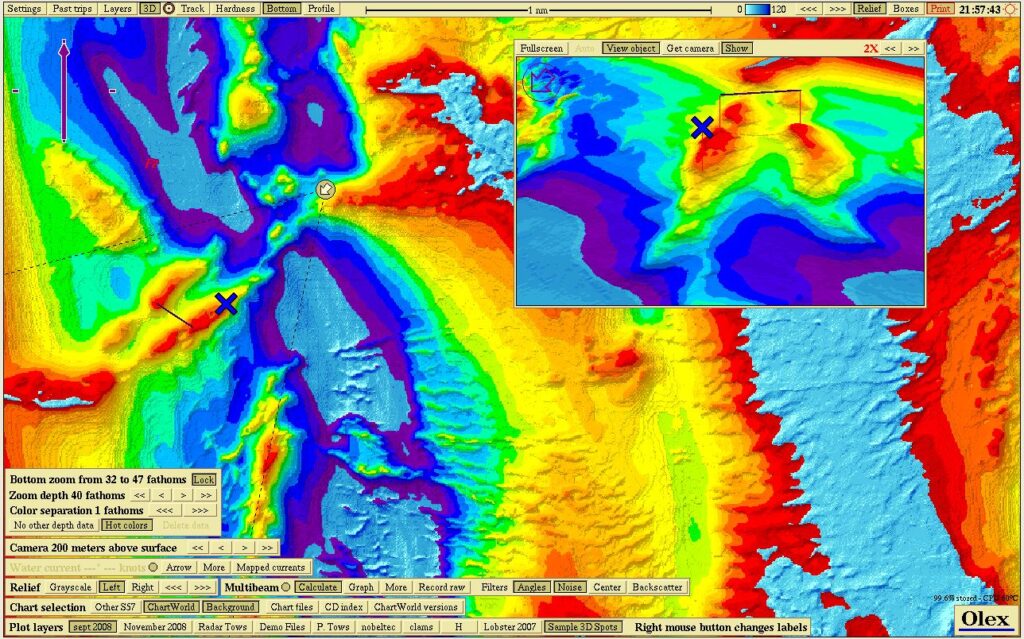
Screenshot with navigation charts, bottom zoom and 3D display
Software updates from Olex are free of charge.
Click here to see what Olex can do!
Request more info on this product
Request service for this product